In AUTOMAPPPS, the task of defining the tool paths and assigning them to robots and ordering them and planning the entire application are partially uncoupled. This reduces the complexity of the taks, i.e. it simplifies the programming and optimization.
What really matters at the end is the processes, thus the tool-paths and their parameters. The robots are “only” means to execute them. Under normal circumstances the robots execute the tool-paths as desired, if AUTOMAPPPS takes care for singularity-avoidance and collision avoidance , consideration of reachabilty, speed and accerlation limits cables etc.. Common robot stuff. Also it should be noted that while you define the tool-paths, the robot which finally executes the path, or the orientation of the 2-axis positioner or the timing does not need to be known yet and can be optimized later.
In AUTOMAPPPS, we partially uncouple the process (as defined by robot tool-paths in the setup editor) and the execution of those paths by the robots and rotation tables etc. This simplifies the programming and optimization: Firstly it is the process result you are interested in – and the robots motions are “only” means to achieve it . Secondly the robot to execute a path, or the axis setting, or the timing (esopecially in conveyor-tracking) is not decided yet. Gently uncoupling those 2 steps reduces the complexity.
Therefore we uncouple editing the “setup” from editing the “workflow”. In the setup, tool-paths are defined more easy – and can be checked for reachabilty etc. In the workflow, the paths are assigned to robots in an order and planned collision-free etc.
The topic of defining or importing tool paths -in the setup editor – is structured as follows
- importing tool paths – and automatic modification to make them reachable by the robot(s)
- definining arbitrary tool paths: for patch-based processes (such as pattern projectors) or pathes that include linear or other motions (grinding, painting)
- easy cad-to-path (cad2path) based definition
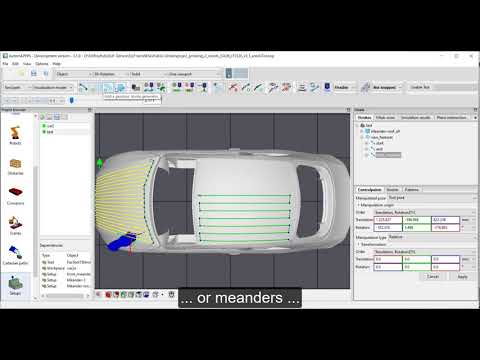
- high-level patterns, susch as different meanders
- even higher level patterns
The elements of the GUI are shown in the next video and described in more detail below
The video is embedded by YouTube and only loaded and played from there when you click on the play button. From then on, the privacy policy of Google applies.



