AUTOMAPPPS - Prelievo collocazione robot
La soluzione di pianificazione del prelievo e movimentazione rapida e affidabile per il prelievo di pezzi da contenitori (bin picking) e prelievo visivo e collocazione. Pianifica il lavoro di prelievo da contenitori 3D per l'intero robot, non solo per le pinze o parti del robot. Il pianificatore può essere configurato e adattato rapidamente ai prodotti, alle condizioni e al contesto delle attività. Per questo, viene fornito insieme a uno strumento per l'installazione, il layout e l'ottimizzazione remota.
- Presa salda, movimenti robot ottimizzati
- Prelievo da contenitori robot con tempi di ciclo più rapidi
- Celle di prelievo da contenitori robot il più piccolo possibile
- Per quasi tutti i produttori robot
- Consente di spostare lo stato attivo sulle applicazioni di creazione di valore
- Considera i limiti di velocità e accelerazione di robot e vincoli di cavi
- Ottimizza da remoto e durante la progettazione cellulare
VANTAGGI:
Affidabilità
- Ennesimi tempi SW distribuiti e comprovati nell'ambiente di produzione
- Robusta pianificazione della presa e pianificazione del movimento senza collisioni per l'intero robot
- Gestisce i disturbi attraverso una rapida ripianificazione
- WYSIWYG: Pianifica, simula e testa prima che la cellula sia realizzata.
Flessibilità
- Praticamente per tutte le applicazioni e tutti i produttori di robot
- Supporta vari sensori per diverse applicazioni
Tempi di ciclo ottimizzati
- Movimenti pianificati più corti, ottimizzati e senza collisioni
- Considera i limiti di velocità e accelerazione e le restrizioni dei cavi
- Pianificazione molto veloce - alternative multiple contemporaneamente
- Sostiene cambiamenti ambientali dinamici nel tempo
Tempi di commercializzazione più brevi, ricavi più rapidi
- Sviluppo più rapido di soluzioni e applicazioni robotiche
- Meno rischi e rilavorazioni con la comprovata tecnologia di prelievo da contenitori dei robot
- Copre tutte le fasi di pianificazione, consente di concentrarsi sulla creazione di valore
- SoP (inizio della produzione) anticipata
Risparmio sui costi
- Riduzione degli sforzi di sviluppo e ingegneria
- Tempi ridotti al minimo per l'impostazione e lancio
- Riduzione del "costo di proprietà", per la manutenzione e l'introduzione di nuove parti
- Layout ottimali delle celle: celle prelievo da contenitori robot più piccole possibili
- Ottimizza da remoto e durante la progettazione della cella


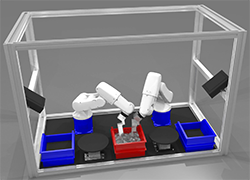

Immagini di prelievo da contenitori robot / prelievo casuale. Esempi di robot per il prelievo da contenitori per gentile concessione di bsAutomatisierung GmbH, Germania e BOLL Automation GmbH Germania.
APPROCCIO:
- Seleziona il sensore ottimale per la parte, in base alla movimentazione, alle superfici, alle condizioni e alla luce
- Disegna pinza per le parti. Convalida e ottimizza utilizzando AUTOMAPPPS
- Seleziona il robot più adatto e ottimizza il layout delle celle utilizzando AUTOMAPPPS
- Specifica presa per ogni parte utilizzando AUTOMAPPPS
- Configura il controller e il sensore delle celle di lavoro
- Esecuzione, lancio
- Ottimizzazione (remota-) tramite AUTOMAPPPS
IMPLEMENTAZIONE:
Condivisione delle attività come chiave per ottenere massime prestazioni e adattabilità:
- Il sensore di visione fornisce informazioni sulle parti riconosciute, parti non riconosciute e ostacoli, scatola di trasporto ecc.
- AUTOMAPPPS trova una presa sicura e ottimale, estrazione e collocazione-movimentazione e genera programmi robotottimizzati ed eseguibili
- Il robot esegue il programma, la separazione di parti viene convalidata
- Il controllore della cella coordina apparecchiature e software e realizza aspetti specifici per la sicurezza e l'applicazione
Il risultato: bin picking robot. Più veloce, più robusto, più completo.
Scarica il volantino per il bin picking casuale / in picking di robot.