Programmazione dell'applicazione di robot industriali
Programmazione dell'applicazione di robot industriali
Milioni di programmi di robot industriali generati con AUTOMAPPPS!
Il software AUTOMAPPPS si è dimostrato una soluzione per la programmazione di robot indsutrial. Per cellule monorobot con e senza tracciamento della linea. Così milioni di programmi robot che sono stati generati da AUTOMAPPPS vengono eseguiti ogni anno. E quando diciamo "milioni all'anno", escludiamo dieci milioni di programmi che sono stati pianificati automaticamente per il bin picking (prelievo di pezzi da contenitori) o altri "lavori brevi".
Programmazione di robot industriali al suo massimo
AUTOMAPPPS è l'acronimo di programmazione di robot industriali al suo massimo. Inoltre è applicabile a quasi tutte le principali marche di robot industriali. Alcune applicazioni e processi robotizzati selezionati idealmente supportati da modelli di processo, simulazione e programmazione di AUTOMAPPPS sono:
- Levigatura, pulizia (pennello), sbavatura, lucidatura, riparazione spot
- Ispezione, metrologia, controllo qualità
- Pittura, rivestimento in polvere, pulizia a umido e con CO2, trattamento superficiale
- • Bin-picking, movimentazione, prelievo e collocazione basati sulla vista
- Taglio, sbavatura, fresatura, processi generativi
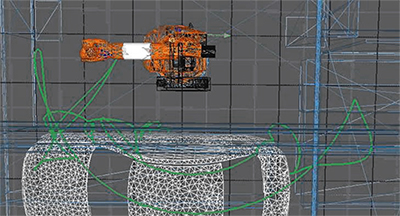
Forno robotico/Sanding
Esempio: macinazione carrozzeria:
- Layout ottimizzato e convalidato
- Spazio richiesto e durata del ciclo ridotti al minimo
- Tempi e costi ridotti al minimo per la programmazione offline dei robot
- Riduzione dei test, dei tempi e dei rischi non produttivi
- Celle comprese tra 1 e più di 10 robot
- Cele con e senza guide, trasportatori e assi rotatori
- Processi con tempo di esecuzione che va da secondi a minuti
Immagine gentilmente concessa da ASIS GmbH, Landshut

Smerigliatura robotica multi-strumento
Esempio: smerigliatura per l'industria alimentare:
- Programmazione veloce per l'utensile di levigatura a testa doppia collegato
- Alta qualità della superficie per le proprietà anti-bactiera
- Alta qualità della superficie per proprietà anti-batteriche
- Cella compatta con parti grandi e robot con asse di rotazione
- Processi di esecuzione molto lunghi

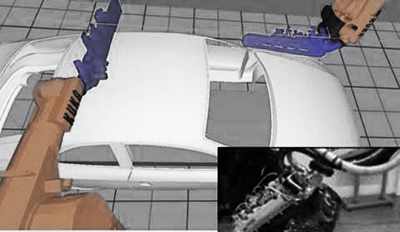
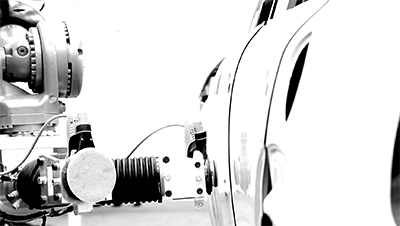
Robot di pulizia
Esempio: 100% pulizia delle carrozzerie delle auto (prima della verniciatura)
- Miglioramento della rimozione della polvere
- Simulazione di pulizia WYSIWYG
- Riduzione dei test e dello stato non produttivo
- Tempi e costi ridotti al minimo per la programmazione e l'ottimizzazione
- Celle con 1 a 6 robot e assi ausiliari
- Riduzione dello spazio richiesto, riduzione dei costi per l'hardware
- Tempo di ciclo minimo
Immagine: Programmazione offline di robot per la pulizia della carrozzeria di auto e test di convalida insieme a WANDRES e un grande produttore di automobili tedesco
Riparazione localizzata robotica
Esempio: riparazione di difetti di superficie rilevati
- I robot smerigliano/lucidano i difetti
- Ingresso: difetti rilevati dal sistema di visione
- 100% pianificazione automatizzata delle attività
- Programmazione di robot in pochi secondi
- Sistema multi-robot
Immagine gentilmente concessa da ATENSOR Engineering and Technology Systems GmbH, Austria
Smerigliatura a cinghia robotica
Esempio: smerigliatura pezzi di forma libera
- Pezzo in mano
- Migliore qualità della smerigliatura
- Simulazione della smerigliatura
- Riduzione dei test e dello stato non produttivo
- Tempi e costi ridotti al minimo per la programmazione e l'ottimizzazione
- Riduzione dello spazio richiesto
Maggiori dettagli dopo l'approvazione.


Misurazione 3D - CMM visivo – Metrologia visiva
Esempio: misurazione 3D di pezzi di lavoro
- Non sono necessari esperti robotici
- Tempi e costi ridotti al minimo per la programmazione
- Test e stato non produttivo ridotti
- Celle di misura monorobot e sistemi multirobot
- Robot con e senza assi ausiliari
- Tempo di esecuzione ridotti al minimo
Immagine gentilmente concessa da AICON 3D Systems GmbH

Ispezione
Esempio: 100% ispezione della vernice
- Migliorare la copertura e il risultato dell'automazione
- Tempo di ciclo ottimizzato
- Prevenzion delle collisioni multi-robot - attiva
- Tempi e costi ridotti al minimo per la programmazione offline dei robot
- Celle di misura monorobot e sistemi multirobot
- Consente un'immersione intuitiva nel processo
Immagine gentilmente concessa da Micro-Epsillon Messtechnik GmbH &CoKG

Controllo qualità
Esempio: controllo robotico delle caratteristiche del prodotto
- Funzionamento semplice e istruzioni del robot
- Compensazione automatica di deviazioni di posa molto grandi
- Istruzioni molto veloci del robot
- Movimenti robot senza collisione in un ambiente stretto - automaticamente
- OEE (efficienza complessiva dell'apparecchiatura) migliorata
Immagine gentilmente concessa da: confidenziale
Rivestimento in polvere
Esempio: Rivestimento robotico in polvere OLP
- Rivestimento e verniciatura in polvere
- Programmazione offline semplice e veloce del robot
- Simulazione per prove e ottimizzazione ridotta
- Supporto per il tracciamentolinee
- Di solito 1-2 robot
- Supporto per assi esterni
Immagine gentilmente concessa da Jungheinrich Moosburg AG & Co. KG, Germania

Verniciatura
Esempio: Programmazione offline di verniciatura robotica
- Programmazione robot semplice e veloce
- Fino a 10.000 varianti e oltre
- Simulazione per prove e ottimizzazione ridotta
- Supporto per il tracciamento linee
- Di solito 1-2 robot
- Supporto per assi esterni
- Programmazione eseguita dal personale del reparto produzione
Marcatura robotica
Esempio: contrassegno dei difetti superficiali rilevati
- Programmazione di robot in pochi secondi
- I robot reagiscono ai difetti
- Proprietà in tempo reale
- Diversi milioni di programmi all'anno
- Maggiore qualità del prodotto
- Oltre 100.000€ di risparmi su costi hardware da parte del software
- Risparmio di spazio nella linea di produzione
- Stop and go o tracciamento trasportatore
- 2 o 4 robotRemoto o a contatto
Trattamento delle superfici
Esempio: 100% trattamento di parti dalla forma complessa
- Movimento del robot senza collisione in cella di lavoro stretto
- Funzionamento semplice
- Previsione della qualità del processo
- Supervisione dei parametri
- Tempi ridotti al minimo per la programmazione dei robot
- Riduzione del rischio
Immagine gentilmente concessa da IPF, Germania

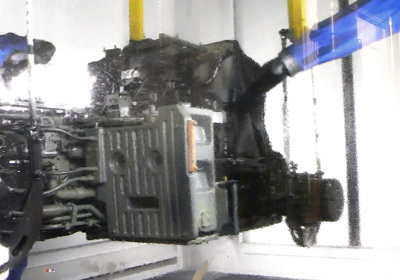
Pulizia ad alta pressione
Esempio: Pulizia robotica
- Programmazione robot semplice e veloce
- Parti comunemente grandi o complesse
- Supporto per tracciamento linee e tabelle di rotazione
- Di solito 1-2 robot
- Supporto per assi esterni
- Programmazione esguita dal personale del reparto produzione


Bin picking (prelievo di pezzi da contenitori)
Esempio: prelievo casuale ad alta velocità di parti metalliche
- Robusto - collaudato frequentemente in officina
- Riduzione del tempo di ciclo attraverso movimenti ottimali
- Riduzione dei costi di time-to-market e di sviluppo
- Riutilizzo più elevato: per praticamente tutti i produttori e sensori di robot
- Configurazione rapida e ottimizzazione remota
- Adattamento rapido alle diverse parti da maneggiare
Immagine gentilmente concessa da bsAutomatisierung GmbH, Germania
Pick & Place
Esempio: Pick-and-place basato sulla visione (esposizione: Vision 2013)
- Robusto - ampiamente utilizzato
- Riduzione del tempo di ciclo grazie ai movimenti ottimali
- Movimento senza collisioni in ambienti ristretti
- Configurazione semplice e veloce
- Adattamento rapido ai nuovi pezzi
- Ottimizzazione remota
Immagine gentilmente concessa da MVTec GmbH, Germania
Sbavatura robotica
Esempio: sbavatura robotica
- Programmazione rapida e semplice del seguimento delle sbavature
- Pianificazione del movimento in parti fortemente strutturate
- Pianificazione di robot e assi esterni
Immagine della cella di sbavatura robotica per gentile concessione di BOLL Automation GmbH, Germania

Taglio / Taglio del legno
Esempio: taglio robot di strutture in legno
- Dimensione lotto 1, programmata automaticamente
- Interfaccia CAM
- Robot e assi ausiliari
- Strutture molto grandi
- Movimento preciso e privo di collisioni in ambienti ristretti
- Completamente integrato nella GUI esterna
Ulteriori dettagli dopo l'approvazione
Correzione della forma
Esempio: Tagli di robot industriali della deviazione della forma
- Dimensione del lotto 1, programmata automaticamente
- Input da sensori di visione 3D
- Corregge forma 3D delle parti
- Diversi utensili di fresatura/taglio in mano
Ulteriori dettagli dopo l'approvazione
Saldatura
Esempio: saldatura utilizzando tabella di rotazione 2 DOF
- programmazione intuitiva basata su CAD
- tempo di ciclo ridotti attraverso movimenti ottimali
- definizione saldatura intuitiva utilizzando CAD
- movimenti privi di collisione in strutture ristrette
Verrà divulgato presto

Taglio a getto d'acqua
Esempio: Taglio ad acqua, 2 robot
- programmazione intuitiva basata su CAD
- tempo di ciclo ridotti attraverso movimenti ottimali
- definizione saldatura intuitiva utilizzando CAD
- prevenzione delle collisioni di 2 robot
Immagine per gentile concessione di UniPro LTD
Inoltre molti altri processi diversi sono stati programmati e simulati con il software di programmazione offline di robot AUTOMAPPPS e un software di programmazione completamente automatico. Ha avuto successo per 20 diverse marche di robot e in combinazione con una dozzina di diversi sistemi di sensori.
Sono supportati persino spazi ristretti, tracciamento di linee in celle ristrette tra catene o ingranaggi o all'interno di carrozzerie di auto, o robot multipli nella stesso campo di lavoro. Di conseguenza, sono state dominate tutte le sfide nella programmazione dei robot industriali senza iterazioni comuni o test approfonditi in anticipo.
Il tuo processo non compare nell’elenco? Inviaci un'e-mail e scopri cosa possiamo fare per te.