Programmierung von Industrieroboteranwendungen
Programmierung von Industrieroboteranwendungen
Millionen von Industrieroboterprogrammen wurden mit AUTOMAPPPS erstellt!
AUTOMAPPPS Software hat sich als Lösung für zeit- und kostensparende Industrieroboter-Programmierung bewährt. Für Einzel- und Mehrroboterzellen mit und ohne Line-Tracking. Jedes Jahr werden Millionen von Roboterprogrammen von AUTOMAPPPS generiert und ausgeführt. Und wenn wir "Millionen pro Jahr" sagen, schließen wir zig Millionen Programme aus, welche automatisch für die "Griff in die Kiste" oder vergleichbare Aufgaben geplant wurden.
Industrieroboter-Programmierung vmo Feinsten
AUTOMAPPPS steht für Industrieroboterprogrammierung auf höchstem Niveau. Darüber hinaus ist es für fast alle gängigen Marken von Robotern anwendbar. Einige ausgewählte Roboteranwendungen und -prozesse, die durch AUTOMAPPPS-Prozessmodelle, Simulation und Programmierung ideal unterstützt werden, sind:
Roboterschleifen
Beispiel: Karosserien schleifen:
- Optimiertes, überprüftes Layout
- Minimierter Platz- und Zeitbedarf
- Minimierte Zeit und Kosten für die Offline-Programmierung von Robotern
- Reduzierte Testläufe, Nebenzeiten und Risiken
- Zellen von 1 bis über 10 Robotern
- Zellen mit und ohne ZUsatzachsen, Förderer und Drehtischen
- Aufgaben mit Sekunden bis Minuten Ausführungszeit
Mit freundlicher Genehmigung der ASIS GmbH, Landshut

Multi-Tool Roboterschleifen
Beispiel: Schleifen für die Lebensmittelindustrie:
- Schnelle Programmierung für Doppelkopf-Schleifwerkzeug
- Hohe Oberflächenqualität für antibakterielle Eigenschaften
- Reduzierte Testläufe, Nebenzeiten und Risiken
- Kompakte Zelle mit großen Teilen und Roboter mit Drehachse
- Anwendungen mit sehr langer Ausführungszeit

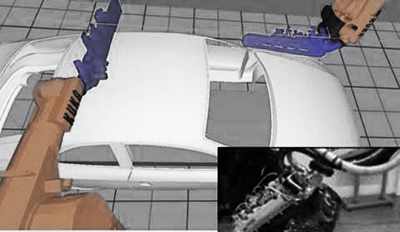
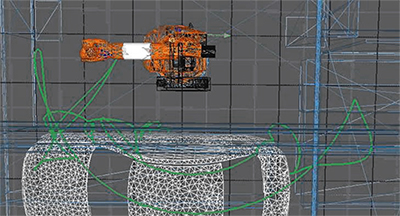
Reinigungs-Roboter
Beispiel 100% Reinigung mit Robotern (vor dem Lackieren)
- Verbesserte Staubentfernung
- WYSIWYG-Simulation der Reinigung
- Reduziertes Testen - und nicht produktive Zeiten
- Minimierter Zeit- und Kostenaufwand für Programmierung und Optimierung
- Zellen mit 1 bis 6 Robotern und Zusatzachsen
- Geringerer Platzbedarf, geringere Hardwarekosten
- Minimale Zykluszeit
Bild: Roboter-Offline-Programmierung einer Karosserie-Reinigung - und Validierungstests zusammen mit WANDRES und einem großen deutschen Automobilhersteller
Reparatur mit Robotern
Beispiel: Reparatur festgestellter Oberflächenfehler
- Roboter schleifen / polieren Defekte
- Input: von den Sensoren erkannte Fehler
- 100% automatisierte Aufgabenplanung
- Roboter in Sekunden programmieren
- Multi-Roboter-System
Bild mit freundlicher Genehmigung der ATENSOR Engineering and Technology Systems GmbH, Österreich
Roboter-Bandschleifen
Beispiel: Freiformteile schleifen
- Teil in der Hand
- Verbesserte Schleifqualität
- Schleifsimulation
- Reduziertes Testen - und nicht produktive Zeiten
- Minimierter Zeit- und Kostenaufwand für Programmierung und Optimierung
- Reduzierter Platzbedarf
Weitere Details nach Freigabe.


3D-Messung - Visual CMM - Visual Metrology
Beispiel: 3D-Vermessung von Werkstücken
- Keine Roboterexperten erforderlich
- Minimierter Zeit- und Kostenaufwand für die Programmierung
- Reduzierte Versuche und unproduktiver Zustand
- Einzelroboter-Messzellen und Mehrroboter-Systeme
- Roboter mit und ohne Hilfsachsen
- Minimierte Ausführungszeit
Bild mit freundlicher Genehmigung der AICON 3D Systems GmbH

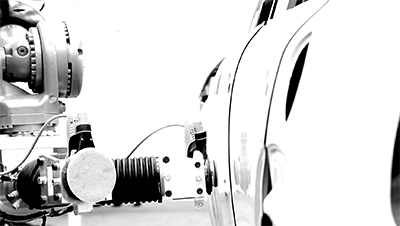
Inspektion
Beispiel: 100% Lackinspektion
- Verbesserung der Abdeckung und des Ergebnisses der Automatisierung
- Optimierte Zykluszeit
- Automatische Kollisionsvermeidung mehrerer Roboter - aktiv
- Minimierte Zeit und Kosten für die Offline-Programmierung von Robotern
- Einzelroboter-Messzellen und Mehrroboter-Systeme
- Ermöglicht ein intuitives Eintauchen in den Prozess
Bild mit freundlicher Genehmigung der Micro-Epsilon Messtechnik GmbH & Co KG

Qualitätskontrolle
Beispiel: Robotersteuerung von Produkteigenschaften
- Einfache Bedienung und Roboteranweisung
- Automatische Kompensation sehr großer Posenabweichungen
- Sehr schnelle Einweisung des Roboters
- Kollisionsfreie Roboterbewegungen in enger Umgebung - automatisch
- Verbesserte OEE (Gesamteffizienz der Ausrüstung ...)
Mit freundlicher Genehmigung von: vertraulich.
Pulverbeschichtung
Beispiel: Roboterpulverbeschichtung OLP
- Pulverbeschichtung und Lackierung
- Einfache und schnelle Roboter-Offline-Programmierung
- Simulation für reduzierte Testläufe und Optimierung
- Unterstützung für die Linienverfolgung
- Üblich: 1-2 Roboter
- Unterstützung für externe Achsen
Bild mit freundlicher Genehmigung der Jungheinrich Moosburg AG & Co. KG, Deutschland
Malerei
Beispiel: Offline-Programmierung für Lackierroboter
- Einfache und schnelle Roboterprogrammierung
- Bis zu 10.000 Varianten und mehr
- Simulation für reduzierte Testläufe und Optimierung
- Unterstützung für die Linienverfolgung
- Üblich: 1-2 Roboter
- Unterstützung für externe Achsen
- Programmierung durch Produktionsmitarbeiter
Markierung mit Robotern
Beispiel: Markieren von erkannten Oberflächenfehlern
- Roboter in Sekunden programmieren
- Roboter reagieren auf Defekte
- Echtzeit-fähig
- Mehrere Millionen Programme pro Jahr
- Gesteigerte Produktqualität
- 100.000 € Einsparung von HW-Kosten durch Software
- Platzersparnis in der Produktionslinie
- Getacktet oder Fließproduktion
- 2 oder 4 Roboter, ferngesteuert oder kontaktbasiert
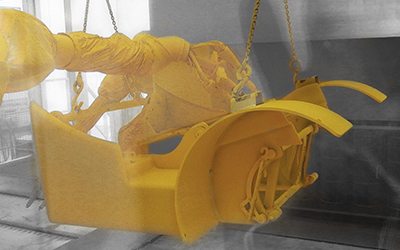
Oberflächenbehandlung
Beispiel: 100%-ige Bearbeitung komplex geformter Teile
- Kollisionsfreie Roboterbewegung in schmaler Arbeitszelle
- Einfache Bedienung
- Vorhersage der Prozessqualität
- Überwachung von Parametern
- Minimierte Zeit für die Roboterprogrammierung
- Risikominimierung
Bild mit freundlicher Genehmigung von IPF, Deutschland

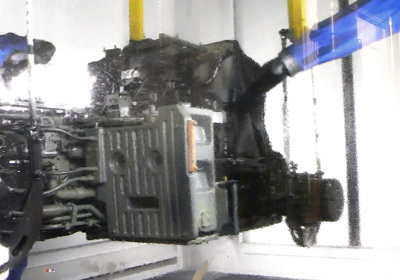
Hochdruckreinigung
Beispiel: Roboterreinigung
- Einfache und schnelle Roboterprogrammierung
- Üblicherweise große oder komplexe Teile
- Unterstützung für Linienverfolgung und Rotationstabellen
- Üblich: 1-2 Roboter
- Unterstützung für externe Achsen
- Programmierung durch Produktionsmitarbeiter


Bin-Kommissionierung
Beispiel: Hochgeschwindigkeits-Kommissionieren von Metallteilen
- Robust - vielfach in der Fabrik bewährt
- Verkürzte Zykluszeit durch optimale Bewegungen
- Reduzierte Time-to-Market und Entwicklungskosten
- Höhere Wiederverwendung: für nahezu alle Roboterhersteller und Sensoren
- Schnelle Einrichtung und Fernoptimierung
- Schnelle Anpassung an verschiedene zu handhabende Teile
Bild mit freundlicher Genehmigung der bsAutomatisierung GmbH, Deutschland
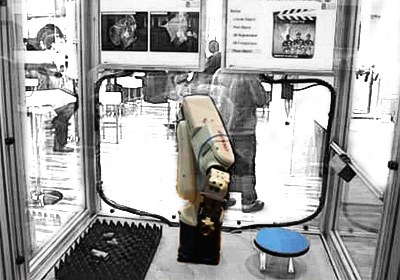
Pick & Place
Beispiel: Vision-based Pick-and-Place (Ausstellung: Vision 2013)
- Robust - weit verbreitet
- Verkürzte Zykluszeit durch optimale Bewegungen
- Kollisionsfreie Bewegung in engen Umgebungen
- Einfache und schnelle Einrichtung
- Schnelle Anpassung an neue Werkstücke
- Remote-Optimierung
Bild mit freundlicher Genehmigung der MVTec GmbH, Deutschland
Entgraten mit Robotern
Beispiel: Roboterentgraten
- Schnelle und einfache Programmierung des Entgratens
- Bewegungsplanung in stark strukturierten Teilen
- Planung von Roboter- und Zusatzachsen
Bild der Roboter-Entgratzelle mit freundlicher Genehmigung der BOLL Automation GmbH, Deutschland

Schneiden / Holzschneiden
Beispiel: Roboterbasiertes Schneiden von Holzstrukturen
- Losgröße 1, automatisch programmiert
- CAM-Schnittstelle
- Roboter- und Hilfsachsen
- Sehr große Strukturen
- Kollisionsfreie, präzise Bewegung in engen Umgebungen
- Vollständig in die externe Benutzeroberfläche integriert
Weitere Details nach Freigabe
Formkorrektur
Beispiel: Industrieroboter bearbeiten Formabweichungen
- Losgröße 1, automatisch programmiert
- Input: 3D-Vision-Sensoren
- Korrigiert die 3D-Form von Teilen
- Verschiedene Fräs- / Schneidwerkzeuge in der Hand
Weitere Details nach Freigabe
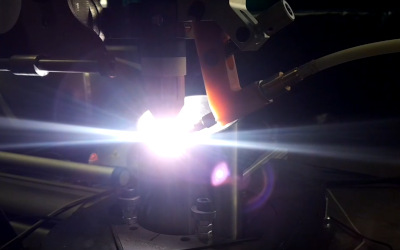
Schweißen
Beispiel: Schweißen mit Schwenk-Neigetisch
- Intuitive CAD-basierte Programmierung
- Verkürzte Zykluszeit durch optimale Bewegungen
- Intutive Schweißdefinition aus CAD-Merkmalne
- Kollisionsfreie Bewegungen in engen Strukturen
Weiter Details nach Freigabe

Wasserstrahl-Schneiden
Beispiel: Wasserstrahlscheiden mit 2 Robotern
- Intuitive CAD-basierte Programmierung
- Verkürzte Zykluszeit durch optimale Bewegungen
- Intutive Schweißdefinition aus CAD-Merkmalne
- 2 Roboter im selben Arbeitsraum
Bild mit freundlicher Genehmigung von UniPro LTD
AGV und mobile Manipulation
Beispiel: Boote/Formen schleifen mit Robotern und FTS
- Planen von FTS und Roboterbewegungen
- Sehr große Teile und schmale Erreichbarkeits-Korridore
- Spezielle Feature-Unterstützung für schnellere Definition von Werkzeugbahnen
- Bauteile ungenau positioniert
Bilder: EuropeTechnologies

Programmierung von Cobots
Beispiel: Offline Programmierung eines TechMan Roboter / Cobots
- Submillimeter Genauigkeit erforderlich
- Hunderte Punkte
- Reflektierende Oberfläche
- Schnelle und einfache Programmierung mit CAD2path ersetzt mühsames Teachen, welches die Augen ermüdet
- Einfache, schnelle Roboter Programmierung
Bild: ATJ Automotive GmbH
Darüber hinaus wurden viele weitere verschiedene Prozesse mit AUTOMAPPPS Roboter Offline-Programmiersoftware und vollautomatischer Programmiersoftware programmiert und simuliert. Es wurde erfolgreich mit 20 verschiedenen Robotermarken und in Kombination mit einem Dutzend verschiedener Sensorsysteme eingesetzt.
Selbst enge Räume, die Verfolgung von Linien in engen Zellen zwischen Ketten oder Kufen oder innerhalb von Karosserien oder mehrere Roboter im selben Arbeitsbereich werden unterstützt. Infolgedessen wurden alle Herausforderungen in der Programmierung von Industrierobotern ohne gemeinsame Iterationen oder umfangreiche Tests im Voraus gemeistert.
Ihr Prozess wurde nicht aufgeführt? Senden Sie eine E-Mail und finden Sie heraus, was wir für Sie tun können.